Teaching & Mentoring
"Learning is active and adaptive: students build understanding through doing, and I refine teaching through feedback and reflection."
Besides my research activities, I am deeply committed to teaching and mentoring the next generation of engineers and scientists. My approach is grounded in formal pedagogical training I received through the year-long CIRTL Postdoc Pathways Program at University of Arizona, where I developed a reflective, evidence-based teaching practice. I strive to create inclusive and engaging learning environments by connecting complex topics to real-world applications. This philosophy has guided my experience co-teaching a graduate-level course in robotic systems and my ongoing mentorship of undergraduate and doctoral students.
Teaching Philosophy
My teaching philosophy is built on a commitment to creating an inclusive and effective learning environment. It is guided by the following core principles:

Reflective & Iterative Practice
I approach teaching as I do research: as an iterative process of setting goals, testing ideas, and using feedback to improve. This reflective practice, informed by the "teaching-as-research" model, allows me to continually refine my methods.

Inclusive & Adaptive Teaching
Recognizing that students learn in diverse ways, I adapt my strategies to create an inclusive environment where every student feels valued. I view student diversity as a resource that enriches the classroom, a principle shaped by my training in evidence-based and inclusive pedagogy.

Motivating Through Real-World Connections
Motivation is key to deep learning. I strive to spark curiosity by connecting course material to meaningful, real-world applications, from NASA's Mars rovers to everyday robotics, to show students the relevance and impact of their work.

Active & Hands-On Learning
True understanding comes from doing. I design courses with a strong emphasis on active learning, using hands-on exercises, assignments with opportunities for revision, and open-ended projects that support students to apply their knowledge, problem-solve, and take ownership of their learning.
Evidence of Teaching in Practice
Below are examples of materials I developed for the “Robotic Systems” course, each designed to address a specific learning goal.
Sparking Curiosity from Day One
Rather than starting with technical details, my first lecture began with the story of ROS's development, connecting it to real-world applications from NASA's Mars rovers to household robots. This narrative approach was designed to motivate students and help them see themselves as creators of impactful technology.
Hands-On Practice
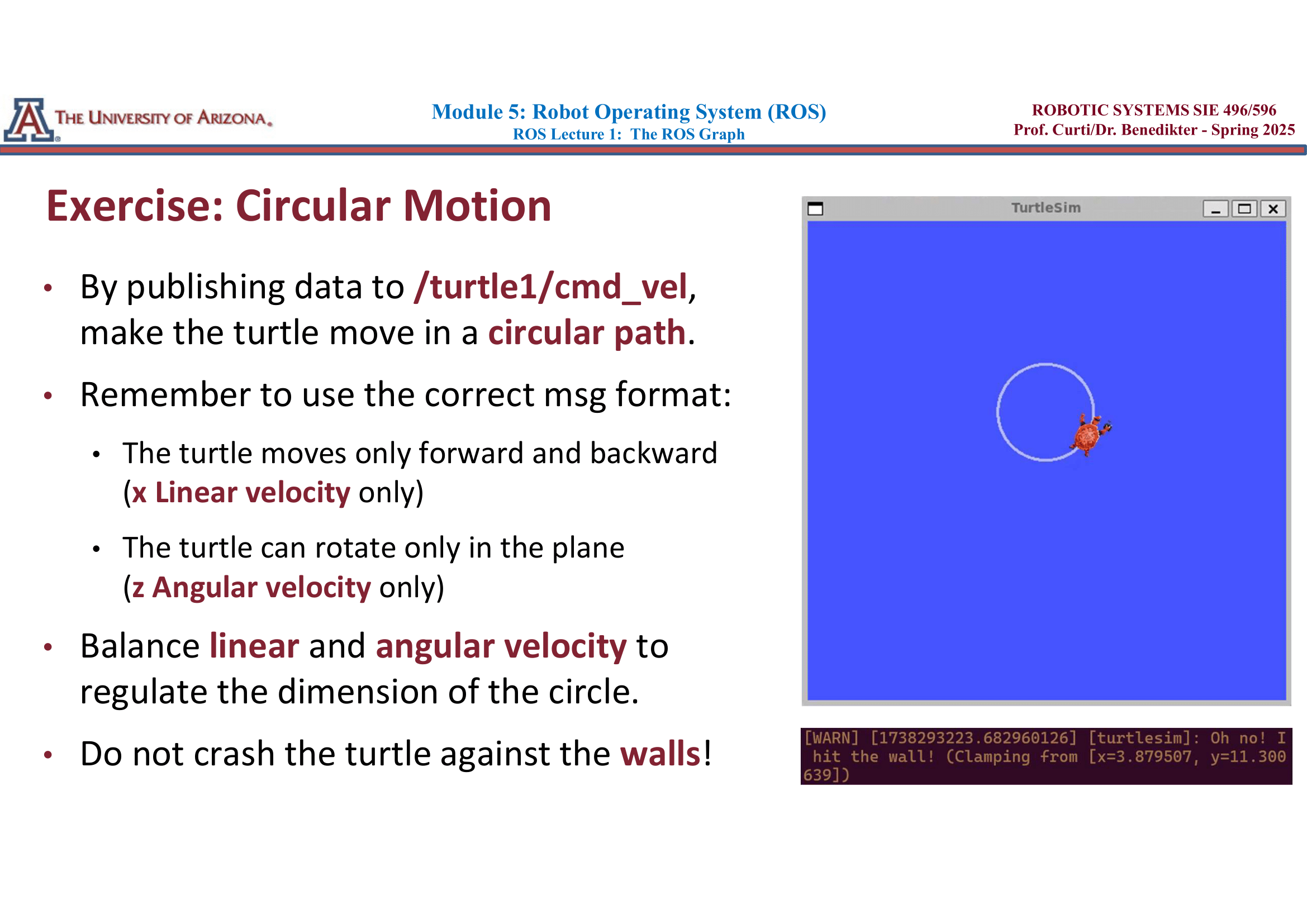
To balance theory with application, I designed hands-on exercises at the end of each lecture. These tasks encouraged students to experiment with concepts on their own time, reinforcing core ideas through active "learning by doing" rather than passive reception of information.
Project-Based Learning
The final project challenged students to apply concepts from across the course in a complex, open-ended scenario: simulating a Mars rover. This approach mirrors real-world engineering practice and assesses students' ability to reason through design decisions and problem-solve independently.
Teaching Mentor Voice
The main instructor of the “Robotic Systems” course, Prof. Fabio Curti, observed my teaching and wrote a letter summarizing his observations.
The letter highlights that we met regularly before and after each lecture to discuss the course content, the students’ progress, and any challenges we encountered. It also emphasizes that I was able to adapt my teaching style to the needs of the students and that I provided clear explanations, comprehensive materials, and fine-tuned exercises and assignments to help students learn effectively.
Student Voices
To evaluate the impact of my teaching, I collected anonymous student feedback after the ROS module. Their responses highlighted the value of clear explanations and hands-on learning, and provided constructive ideas for future iterations.
“Very good explanation of ROS from the very basic presentations, into more detailed examples. I enjoyed the small mini project Turtlesim as a basic project to learn hands on.” — Graduate Student
“It would be cool if we started doing ROS projects earlier… For example, you could give an sdf file of the world, and have the student write code for the simulation to navigate the course as a step before implementing any reinforced learning.” — Graduate Student
This feedback reinforces my goal of increasing student engagement and providing structured opportunities for experimentation, which I will incorporate in future versions of the course.
Instructional Experience
-
Spring 2025Co-Instructor — SIE 496/596: Robotic SystemsUniversity of Arizona
Designed and delivered a 4-week module on the Robot Operating System (ROS) for a mixed senior undergraduate and graduate course. I developed all instructional materials, including lectures, hands-on exercises, and a final project, focusing on active learning and real-world applications.
Pedagogical Training
-
Spring 2025Faculty Learning Community on Teaching in PracticeUniversity of Arizona
Engaged in biweekly peer mentorship and reflection meetings during a mentored co-teaching experience, focusing on applying pedagogical theory and sharing practical challenges and successes.
-
Fall 2024Faculty Learning Community on Evidence-Based TeachingUniversity of Arizona
Participated in weekly meetings with a cross-disciplinary cohort of postdoctoral scholars to discuss pedagogical theory, share insights from the CIRTL online course, and develop co-teaching plans.
-
Fall 2024An Introduction to Evidence-Based Undergraduate STEM TeachingCenter for Integration of Research, Teaching, and Learning (CIRTL) Network
Completed an 8-week asynchronous online course covering foundational topics in active learning, inclusive pedagogy, and effective student engagement.
Mentoring
Mentoring is not just a responsibility alongside research; it is a commitment to a student’s learning, growth, and future. My goal is to foster a collaborative environment where students can develop into independent and impactful researchers.
My approach to mentoring mirrors my teaching philosophy: I see it as a shift from delivering content to guiding and supporting. I aim to create a space where students feel empowered to tackle open-ended challenges, reason through design decisions, and learn through an iterative process of inquiry and reflection. By providing consistent feedback and asking probing questions, I help students build not only their technical skills but also their confidence and creativity.
Doctoral Students
- A. Garzelli (2023–Present): Research on stochastic optimal control for spacecraft rendezvous and UAV guidance.
- L. Ramponi (2025–Present): Research on DeepONets and Transformers for space situational awareness.
Undergraduate & M.Sc. Theses Co-Advised
- F. Gettatelli (2023), “Convex Optimization of Ascent and Powered Descent of a Reusable Launch Vehicle”, M.Sc. in Space and Astronautical Engineering, Sapienza University of Rome
- A. Capelle Domínguez (2023), “Convex Optimization of Powered Guided Landing on Mars”, B.Sc. in Aerospace Engineering, Sapienza University of Rome
- I. Llansó y Pérez (2022), “Convex Optimization of ΔV-EGA Interplanetary Trajectories”, B.Sc. in Aerospace Engineering, Sapienza University of Rome
- A. Vittori (2021), “Convex Optimization of Mars Descent Trajectories”, B.Sc. in Aerospace Engineering, Sapienza University of Rome